ESP32でコントロールしようとしているポイントマシンのメカの方も検討を進めているので、行きがかり上ここで掲載を。求められる性能としては下記があげられる。
- シンプルな構造
- 位置決めが簡単
- 薄型実装可能
- 高耐久性
- メンテナンス容易
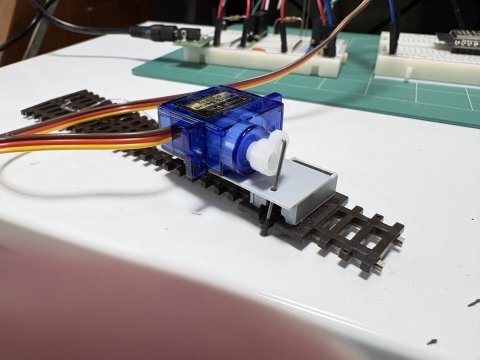
どれも当たり前と言えばその通りなのだが、メカで可動部分が多くなるとどうしたってどこかの箇所で故障が発生しやすくなるので簡易な構造にしたいし、薄型実装に関しては、モジュールベースに 20mm厚のスタイロフォームを使用している関係で出来ればその中に埋め込める高さに抑えたい、という思いがある。メンテナンス性についても、故障や調整時にブロック毎交換出来るような構造にしたいと考え、下写真のようなパーツを試作してみた。
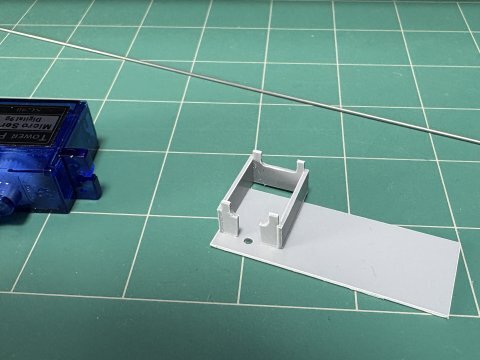
素材は0.8mm厚のプラ板をシンナーで貼り合わせたもので、今だったら 3Dプリンターで簡単に量産も出来そうだが、残念ながら当社工場にそんな設備は無いので、数が多くなってもなるべく簡単に作れる形状に設計した。
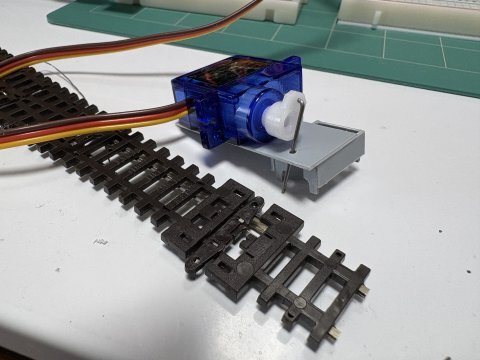
4本の突起は、PECOポイント部に開いている穴に嵌め込んで固定する為のもの、固定板部に開けた丸穴は、板の裏面に固定したサーボモーターのアームに繋いだピアノ線を通し、テコの支点として機能する。固定板もテスト用として同じ 0.8tだが、量産時にここはもう少し強固なものにし、耐久性を考慮すると穴は何等かの金属で補強した方が良いと考えている。